




")
















Već smo odavno duboko zakoračili u svet elektronike. Elektronska pomagala sve su preciznija i intuitivnija, odnosno rade gotovo neprimetno, a pomažu mnogo. Raniji sistemi kontrole proklizavanja i ABS-a bili su izuzetno sirovi, što danas nije slučaj zahvaljujući jednoj komponenti koja nosi skraćenicu IMU. Šta je IMU i kako funkcioniše objasnićemo u tekstu koji je pred vama.
IMU je akronim od reči Inertial Measurement Unit, što na našem jeziku znači inercijalna merna jedinica. Pošto iz samog naziva ne možemo nešto više da saznamo, krenućemo od samo početka i upotrebe ovog uređaja kroz istoriju. IMU se već dugi niz godina koristi u avionima i sistemima za navigaciju, pa je tako sa napredovanjem tehnologije dospeo i na motocikle.
Od čega se sastoji IMU i šta radi?
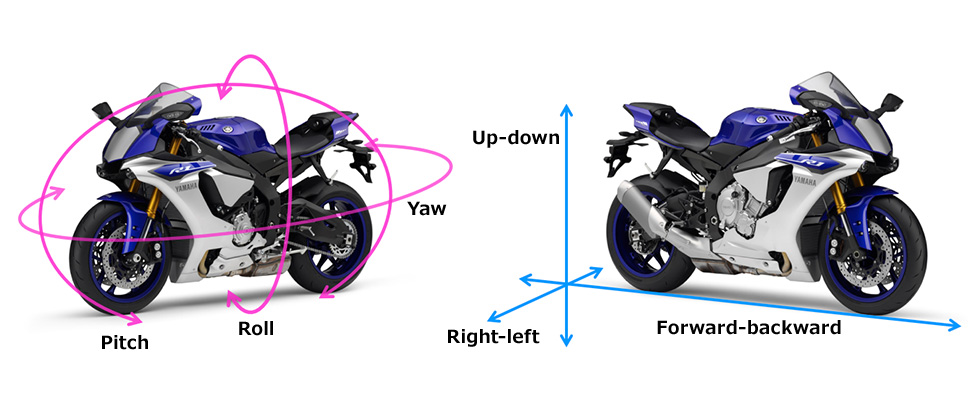
Otkud to da se uređaj iz avijacije nađe na motociklima. Ne znam da li ste nekad razmišljali i bavili se time, ali avioni i motocikli imaju dosta sličnosti prilikom kretanja. Kako na avione, tako i na motocikle deluju centrifugalne i centripetalne sile, zatim oba imaju naginjanje ka levo i desno, poniranje ka napred i podizanje ka nazad. Jedina je razlika što motocike ne može da se okreće oko svoje ose (osim kad padnemo).
Zato je bilo prilično komplikovano implementirati sisteme koji će raditi dobro i kada je motocikl pod nagibom. Na primer, da li ste se pitali zašto ABS radi samo na pravolinjskom kočenu, a ne radi pod nagibom? To je upravo zbog toga što pređašnji ABS sistemi nisu mogli da “prepoznaju” parametre kada se motocikl nalazi pod nagibom. Danas već uveliko postoje ABS sistemi koji funkcionišui kada je motocikl pod nagibom, a sve zahvaljujući IMU sistemu.

Isto važi i za kontrolu proklizavanja. Kada je motocikl pod nagibom, prednji i zadnji točak ne okreću se istom brzinom, jer dimenzije točkova nisu identične. Budući da kontrola proklizavanja prikuplja podatke o broju okretanja točkova, kao i brzine kretanja, programiranje kontrole proklizavanja nije bilo moguće precizno uraditi. Opet, sve do pojave IMU jedinice.
IMU jedinica u sebi sadrži akcelerometa koji meri ubrzanje ili usporenje motocikla, zatim sadrži žiroskop na osnovu kojeg se određuje položaj motocikla.
Akcelerometar unutar IMU funkcioniše tako što se određena masa nalazi okružena oprugama i u zavisnosti od ubrzanja motocikla masa vrši pritisak na opruge i budući da su poznate sile koje deluju na opruge kao i masa, lako se izračuna ubrzanje motocikla. Akcelerometar meri ubrzanje (ili usporavanje u tri ose, gored, dole i bočno). Iza principa rada funkcionisanja akcelerometra krije se čitava nauka, ali je ovo najjednostavnije objašnjenje koje vam je dovoljno kako biste shvatili princip funkcionisanja akcelerometra.
Žiroskop u IMU jedinici takođe meri položaj motocikla u tri ose, ali takoreći izvedene ose, odnosno pod kojim uglom se nalazi motocikl. Žiroskop detektuje da li je motocikl nagnut ka napred ili nazad, zatim pod kojim nagibom se nalazi, kao i zakretanje motocikla u odnosu na pravac kretanja motocikla.

Zato kada čitate tekstove o novim motociklima, često možete videti da piše da motocikl poseduje IMU koji meri ponašanje motocikla u 6 osa. Postoje i oni sa 3 ose, koji ne poseduju žiroskop, ali se danas radi i na sistemima sa 9 osa, koji imaju dodatne senzore i mere još više uglova i položaja motocikla. Sistem sa 6 osa koji smo opisali je najčešći na današnjim motociklima.
Kako IMU doprinosi preciznijem i boljem radu kontrole proklizavanja?
U redu, imamo sve ove podatke, ali kako oni pomažu da sistemi poput ABS-a i kontrole proklizavanja funkcionišu bolje? Logično pitanje. Podaci koje prikuplja IMU zajedno sa podacima poput broja okretanja prednje i zadnjeg točka, kao i brzine kretanja obrađuju se zajedno i na osnovu njih fabrika pravi alogritme preko kojih se određuje koliko će koji sistem (ABS, kontrola proklizavanja) u određenom trenutku da reaguje.
Na primer: krećemo se brzinom od 100 km/h, motocikl se nalazi pod uglom od 35 stepeni. Naglo dodajemo gas u trećem stepenu prenosa. Kompjuter prikuplja informacije sa IMU i sa drugih senzora i procenjuje da dolazi do proklizavanja zadnjeg točka. Zadnji točak počinje da se okreće za 15 km/h brže u odnosu na prednji. Na kontrolnoj tabli imamo podešen nivo kontrole proklizavanja na srednji. Kompjuter sve to uzima u obzir, uključuje kontrolu proklizavanja i sprečava da preteramo sa gasom. Ovde dolaimo i do zanimljivog dela, bitnog za brze krugove na stazi. Kontrola proklizavanja ne usporava zadnji točak na istu brzinu kao i prednji, već dopušta da se okreće nešto brže od prednjeg, kako se ne bi zaustavilo ubrzanje motocikla.
Zato postoje nivoi osetljivosti kontrole proklizavanja. Na putu nam ne znači ništa da li ćemo ubrzati manje ili više, bitno je da nas sistem spasi od pada. Dok je na stazi situacija drugačija, pa su čak proklizavanja i dobra stvar na izlasku iz krivine.
Zahvaljujući IMU i “Ride-by-wire” sistemu, osim kontrole proklizavanja i ABS-a bilo je moguće ugraditi i sisteme koji sprečavaju podizanje prednjeg točka, ali i kontrolu startovanja motocikla.
Jednostavno, IMU je doprineo da sva elektronska pomagala funkcionišu na precizniji način i da odu korak dalje u pružanju bezbednosti.

U tekstu sam se trudio da maksimalno pojednostavim stvari kako biste lakše razumeli princip funkcionisanja IMU jedinice. Nadamo se da vam je ovaj tekst pomogao da shvatite kao IMU funkcioniše i koje su njegove glavne prednosti. Čvrsto verujem da će u budućnosti gotovo svi motocikli imati IMU jedinicu.
Da li želite da dobijate obaveštenja o novim tekstovima?
Svakog petka ujutro šaljemo email sa listom tekstova koje smo objavili te nedelje, svima koji su se prijavili na BJBikers email bilten. Na taj način možete ostati u toku sa novostima, čak i ako neki tekst propustite u toku nedelje…




{kind=link}